

History of precision agriculture
1996
In 1996 Louis van den Borne took the first step towards precision farming. A registration system was tried out which was linked to a Muller UNI-Control S. The UNI-Control-S on-board computer can be used all year round, on many agricultural machines, for measuring (areas / distance traveled), controlling (from quantities), checking and storing the data (Müller-Elektronik, 1994).
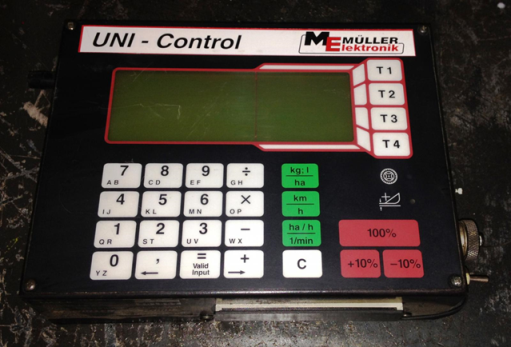
This system was purchased to have the spray registration done automatically by measuring fuel consumption and task times and carrying out personal registration. In combination with cost price calculation and stock registration, this was a reliable and simple system.
1998
The chip card of the UNI-Control S was supported by Comwaes until 1998. When MS-DOS switched to Windows 3.1, Comwaes was no longer able to support the chip card and the system became useless as long as no other support company was found. Dacom, a company that has been producing cultivation registrations using advanced ICT solutions since 1980, employed a programmer who also worked with the Müller UNI-Control. The mechanic who was employed ensured that the system remained supported, so that van den Borne kept the system.
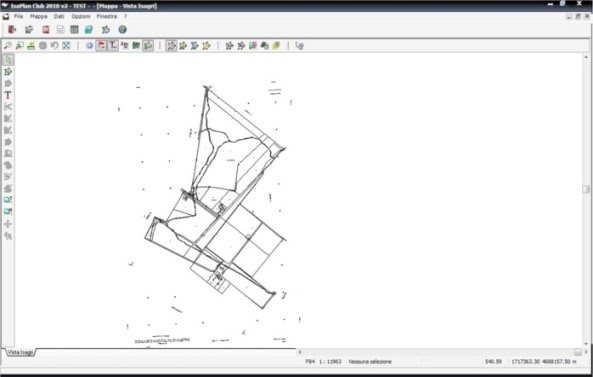
In 1998, the first steps were taken with regard to registering field boundaries. ISAplan, a French software, was developed for geo data. In this software it was possible to process data. A program that was part of ISAplan was ISAGPS. This program ran on a PDA, a so-called I-PAC. The field boundaries were broken into with this PDA. Because there was no RTK-GPS yet, these field boundaries were accurate to within 5 meters.
The field boundaries were then processed in ISAplan. It was not possible to place a background behind the field borders. The available maps only contain backgrounds of the Netherlands. The plots were spread over the Netherlands and Belgium, so these maps could not be used as a background.
Through contacts with Dacom through the Uni Control S system, Dacom's potato disease model was tried out in 1998. A weather station was set up for this. The disease model sorts the plots by risk. Dacom uses a point system. This was ranked in priority of spraying. Disease-prone plots are at the top of the list. In combination with the Müller UNI-Control S, tasks of disease control could be loaded. The spraying computer calculated the amount of spraying agent per hectare. The crop stage, crop growth and crop position had yet to be entered. Both sprayers that Van den Borne owned were equipped with a UNI-Control S.


2000
Jacob wanted to work at home in 2000. However, his father, Louis, made him study further. Jacob went to the HAS in Den Bosch. In his third year he did an internship at Grimme, where they were busy with yield measurements. The sensors on the harvester were therefore tested at Van den Borne Potatoes, which were very good. The sensors were purchased and mounted on the potato harvester at Van den Borne.
In addition, the wish came to map parcels on the basis of so-called 'staff maps' of the Netherlands and Belgium. This did not work in practice, because the border maps of both countries did not match. After scanning, the field boundaries did not match.
The solution was found at Synoptic. This was a geographic company from Wageningen that sold satellite maps. These cards could be used as a background. The disadvantage of these maps was the fact that roads and streets were not visible on these maps. New road maps were purchased for this from Tele Atlas. This company was later taken over by TomTom.
2004
In 2004, a fertilizer spreader was purchased that could measure the application. This made it possible to determine exactly how much fertilizer was spread on each plot. This Rauch machine was able to spread variable doses on the left and right via ISOBUS. The dosage could be adjusted manually. There is as yet no software that can dose left and right controlled.

A Hassia hydraulic poter was purchased, which allowed 10% more planting in the middle rows. This had the advantage that in the two ridges next to the spray paths, 10% more seed potatoes were planted.
2006
In collaboration with PPL, van den Borne potatoes installed a soil moisture sensor, in order to be able to control the irrigation. This irrigation system was supplied by Dacom. The soil sensor measures the soil moisture present, so that shortages can be noticed quickly.
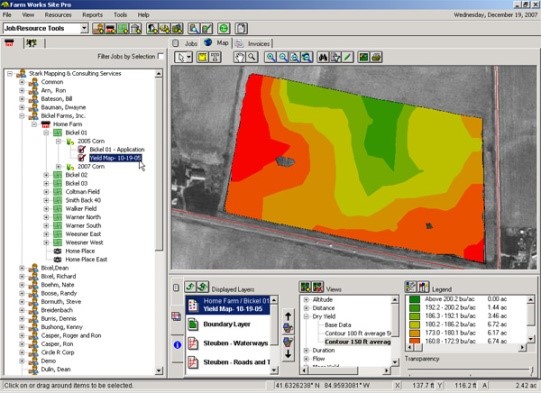
Because more and more data was collected with different systems, Van den Borne chose the software package Farm Works Software. Farm Works Software makes it possible to pre-draw maps, but also to adjust them afterwards. The cultivation registration can also be done with Farm Works Software. The reason for purchasing Farm Works Software was that it could process more different data from different manufacturers.
2007
To further introduce precision farming into the company, a new tandem trailed sprayer was purchased from Dammann in 2007. This sprayer was equipped with a section control via GPS. All this was controlled by means of ISOBUS, which resulted in huge savings in the number of cables running from the tractor to the implement. The operation was also integrated by ISOBUS.
This sprayer had a steering wheel with a question mark in the software, after which Jacob did research into the meaning of this icon. He ended up at Reichardt. Reichardt is a German supplier of GPS systems. They supplied the first GPS system that used D-GPS in combination with ultrasonic sensors. This made it possible to achieve a precision of 2 to 3 centimeters.

In the spring of 2007 we started a new team on trial.
The new team is a Lemken Varitansanit 7 scissors. We plowed with a Fendt 820 Vario. This has a maximum power of 206 hp. Plowing went superbly this year. The new team has proven itself well this spring. Thanks to a new Lemken system that ensures that the wheel slip, which is standard around 20% to 25% during plowing, is reduced to 3% to 5%, all horsepower can be used optimally. This makes it possible to pull a 7-furrow plow with ground supports and a packer with a 200 hp Fendt. Plowing the headlands is also very easy. We always plow the headlands in with the front. We can lift at the last wheel for the rear wheel so that it does not plow for more. With this team we were able to plow an average of 7 km / h with the radar sensor (minimum slip). The plow has a working width of 3.75 meters. This amounts to a capacity during plowing of just over 2.5 ha per hour. If we count the turning and road transport, we arrive at an average capacity of 2.2 ha per hour. This gives it the same capacity as the spading machine.

2008
Season 2008 has started with the use of two Hassia SL + poters. Midway through the season, Miedema introduced the Hassia CP. This machine was improved over the SL +. Missing control, tramline control and depositing of potatoes are examples of this. These improvements increased the precision of the poter.

The sprayer purchased in 2007 had section control via GPS with three meter sections and in 2008 it was equipped with six Greenseekers installed by Randy Wilbrink. These are biomass sensors that measure the density of the crop by means of light reflection. Because the Greenseekers each have their own light source, measurements can be made both during the day and at night. The useful data of the Greenseekers is expressed in NDVI, Normalized Difference Vegetation Index. This data was processed in Farm Works Software.
2009
After the testing phase of the Hassia CP in 2008, two Hassia CPs were purchased in 2009. Reichardt's GPS system was extended with RTK, Real Time Kinematic. This improved the accuracy of the GPS system to 2 centimeters deviation. This made the ultrasonic sensors superfluous and increased ease of use. No additional ultrasonic sensors now had to be mounted on the tractor and carried over the fields. The GPS system was also extended with an autopilot. This allowed two tractors to work in the same field at the same time, without overlapping. A second advantage was that the potatoes are now exactly right in the back. As a result, less harvesting damage can occur. The straight-row system allowed the driver to concentrate better on the potters, further improving the quality of the planting work.
Since 2009 we also use soil moisture sensors. These sensors measure how much water is left in the soil. By measuring the moisture in the soil, we can choose an optimal moment of irrigation, which prevents plant stress and water is used efficiently.
Because the Greenseeker can only measure NDVI, Van den Borne Potatoes looked for another, comparable sensor that could measure multiple wavelengths. At the Agritechnica in Hanover, contact was therefore made with Fritzmeier.
2010
Since 2010, an autonomous Probotiq vehicle has been used to scan the soil. With this vehicle, a Kubota, the plot is scanned for soil scanning. Because this vehicle has RTK-GPS, the field boundaries are accurate to within 2 centimeters. After the plot boundaries have been broken in, the Kubota can drive independently on this plot. The Crop-R program is used to map all parcels. This cultivation registration program can keep track of all actions on all lots, so that employees can easily find the lots, but can also register all actions.
The Kubota, which was purchased in 2010, was part of a project that PPL carried out together with WUR. For this, the EM-38MKII was purchased by Van den Borne Potatoes. PPL's project included an issue of yield potential based on soil conductivity.
After the conversation with Fritzmeier at Agritechnica, a trial was carried out in 2010 by placing all available crop sensors on the spray boom. In addition to the Fritzmeier, these sensors were the YARA-N-Sensor, the OptRx and the Greenseeker. Indeed, after a year's trial, Fritzmeier proved to be the most reliable crop sensor.
The potato harvester was equipped with new sensors. Grimme's sensors were replaced. The new yield sensors that were mounted on the AVR Puma could
accurately map the yield.
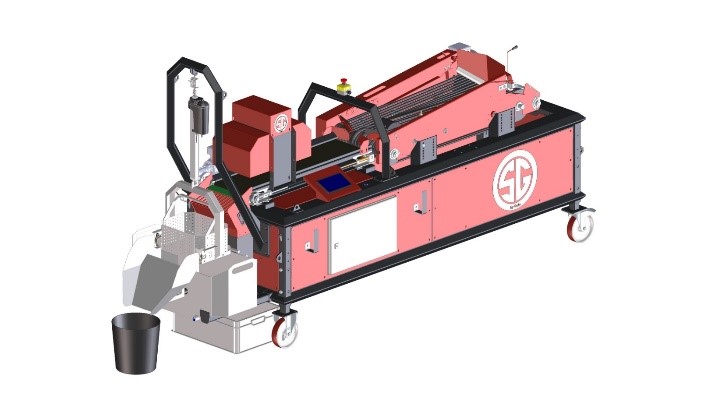
In order to be able to take yield measurements, an advanced, specific yield monitor is used. This monitor, called the YieldMaster PRO, was developed by Van de Borne Potatoes in collaboration with Probotiq. The YieldMaster PRO works as follows: weighing sensors are mounted on the potato harvester. These weighing sensors are mounted under a conveyor belt on the harvester. The potatoes that are harvested come over this belt and go to the storage bunker on the harvester. The weighing sensors measure the mass flow of the potatoes going over the conveyor belt to the machine's hopper. The data from this measurement is combined with the driving speed of the harvester, belt speed and GPS information. By making this combination one can make accurate and location specific yield maps. In addition to yield maps, weights of various loads and plot and daily totals are also recorded.


2011
The Hassia CP, which was equipped with section control, was GPS controlled in 2011. The software, the HMI GPS planting Comfort, has been installed and ensures that the four planting elements are switched on and off at the right time. First, the contours of the plot are broken in. Then the plot can be planted and the software ensures that the sections of the poter are switched on. In addition, the leg distance was infinitely variable.
During the harvest, a yield measurement was made for the first time with the shredder of contracting company Reyrink from Diesen. This is done via a yield measuring system just after the pick-up and a dry matter measurement in the pipe. The intention was to map the test plot of grass in order to subsequently optimize fertilization.
Nevertheless, after an investigation it appears that yield measurements via chopping grass are not reliable. The grass that stands on 1 m2 is divided over a spot of 117m2 when mowing and shaking. When raking, the same grass is divided on 2 swaths. This investigation has therefore shown that the grass that is being chopped has not grown in the same place.
Drones were first flown. The Nederland van Boven program explained how this works. Multi-spectral cameras show which areas of land need more or less fertilization. This camera is able to measure multiple bandwidths of light reflection, allowing to measure leaf mass and crop vitality. This happened with an airplane from Aura Imaging. On the basis of these camera images, variable foliage was sprayed to death for the first time, via the ISOBUS of the sprayer.
2012
In order to be able to apply even more site-specific fertilization, Danny Goris, contract worker in Dessel (BE) bought a three-axis manure spreader, which could read task cards. This made it possible to spread variable solid manure. The reason for this was the differences in the plots measured by the EM-38MKII.
The fertilizer spreader was equipped with a weighing installation in 2012. This made it possible to calculate exactly how much fertilizer was spread and in what quantity per location.
The second innovation with the potato legs was the use of shadow maps. Potatoes were spread further apart in the shade because the yield in the shade is already lower. It is therefore better to invest in fertilization, less compaction and other factors in places with a greater yield potential than in places where there is no great potential.
A new Dammann sprayer was purchased, which had a double tank with a direct injection system. This allowed fertilizers and plant protection products to be combined, but dosed separately. The direct injection system means that the fertilizers and plant protection products are injected directly into the pipe, so that no residues remain in the tanks. This sprayer was also equipped with section control per cap. Six Fritzmeier sensors were purchased and mounted on the boom.


New Fritzmeier sensors were purchased and placed in a trestle in the front linkage. The fertilizer spreader could be controlled directly in this way, without first having to load the data into Farm Works Software to create task cards. This was done via an online system using ISOBUS. In combination with the new weighing installation that was built on the fertilizer spreader, it was immediately possible to see how much fertilizer was spread per location.
The first drone was also bought by Jacob this year. This concerned the Parrot AR Drone. This drone was mainly used as a practice drone. Jacob used this to make videos of the machines.
The beets are harvested for the first time with a Grimme Maxtron from Loonbedrijf Van Eijck equipped with yield sensors. The yield differences are used to adjust fertilization in the spring.
2013
After the first drone was bought in 2012, it was replaced in 2013 by the DJI Phantom I. Jacob also used this drone for practicing flying. He used a straight lens instead of a Gopro to take photos and videos. He was one of the only in the Netherlands.
For the first time, tests have been carried out with top dressing in the potatoes using the Fritzmeier crop sensors with the Dammann sprayer. It turns out that there is still a lot to adjust to spray good fertilization. The Fritzmeier's calculation rules have not yet been developed enough to provide good advice.
2014
Because Agrometius became a dealer of Veris, Jacob wanted to try it on his field to test and compare the Verisscan of Agrometius and the EM-38 of Geonics. The Verisscan works in a slightly different way, namely destructive. This allows the pH of the soil to be measured. However, it takes a much heavier trigger to perform this scan to do.
The results of the test are detailed in the table below.
| property/scanner | Dualem EM-38MKII | Verisscan |
|---|---|---|
| Depth | 0,5 - 1,0 m | 0,3 - 0,9 m |
| pH | no | yes |
| Soil conductivity | yes | yes |
| Tractor | Kubota 50 pk | Tractor 150 pk |
| Accuracy | 5 meter | 10 meter |
| Destructive | No | yes |
A test was also done with Miramap. Miramap specializes in detecting moisture. The scanner that takes care of this is the Mirascan. This is a longwave radar that detects the presence of soil moisture by means of low frequencies.
In late 2013, it was decided to purchase a Dammann three-axle self-propelled sprayer with a double tank. These tanks together had a capacity of 12000 liters. This sprayer was also equipped with six Fritzmeier sensors. The section control that was installed sent the syringe per three caps. The tandem syringe that was purchased in 2012 was also converted back to section control per three nozzles. Section control per cap did not give the expected benefits. To demonstrate the operation of the section controls, a grassland to be sprayed to death was covered with the Van den Borne Potatoes logo.

Maize was harvested this year with a Case Axial flow. Loonbedrijf brothers Vermeulen from Bladel bought this machine that was equipped with a yield system. This made it possible to notice differences in the plots, which were also clearly visible. The fertilization could then be adjusted in the spring.
The DJI Phantom I was replaced by the new version, the DJI Phantom II. This had a number of improvements compared to the first version, such as a better battery. It also flew for the first time with a Sky Hero, which could be used for karting. These cards were "stitched". This means that the photos taken by the Sky Hero could be linked together, creating one large map. The Sky Hero was also equipped with waypoint navigation, which made flying with a remote control unnecessary.
In addition, a beautiful video was made in 2014 about precision farming at Van den Borne Potatoes. This video is shown below.
2015
The Dualem EM-38MKII was able to measure the conductivity at 0.5 meters and 1 meter depth. Disturbing layers can, however, be much deeper into the soil. The Dualem 21S was purchased in 2015. This bottom scanner is able to take measurements at four different depths, namely 0.5 meters, 1 meter, 1.5 meters and 3 meters. This allowed a more accurate scan to be made.

A test was done by Bert Rijk with the Ebee. The eBee is an automatically controlled, lightweight UAV, suitable for taking aerial photos. With the 16MP high resolution camera, the eBee captures images with a ground resolution of 3 to 30 cm per pixel. The eBee not only takes orthophotos, but also view photos (Sensefly, 2015).
The eBee is launched by hand. Because the wings can be easily disassembled, the eBee is easy to transport.
Jacob himself replaced his DJI Phantom II in 2015 with the DJI Inspire 1. This is a quadcopter that can fly a maximum of 3 kilometers at a top speed of 80 km / h. The landing gear can collapse, allowing the camera underneath to rotate 360 degrees. It can also be watched live with this drone via an app on a smartphone. Two controllers can even be connected, so that someone can fly and someone can operate the camera. (DJI, 2015) This drone was also equipped with waypoint navigation. The fields were still measured with RGB photos. These photos were used to count plants and calculate growth per spot.
A number of new sensors were purchased in 2015. First of all, Van den Borne has bought 12 new soil moisture sensors from Dacom. These sensors are placed on different plots, so that accurate information is sent to Crop-R.
Lemken had designed a new team that supports ISOBUS. As a result, the shift control was integrated into the ISOBUS CCI Terminal. The team in question is the Lemken Juwel with Fixpack. The Geoplough X system has since been disassembled. The compaction of the fields is now measured on the basis of the tractive force control.
The Danish firm Fasterholt came to visit after they heard at a lecture that Van den Borne Potatoes has been working on precision sprinkling for a number of years. She asked if Van den Borne wanted to think about an application on their machines. Fasterholt builds self-propelled irrigation reels. One of these was tested in 2015. After a week it was decided to buy a second reel.

The boom that was purchased in 2014 was then mounted on a self-propelled reel. This increased capacity and consumed less energy. The reel hoses are also thinner, as they no longer need to be pulled.
For a PPL project, 3 new cameras with tare detection were placed on the new AVR Puma. Initially it was intended to detect tare such as clods and stones. In practice it turned out that the cameras could be used to measure quality parameters, such as the length and thickness of the potatoes. This project was also financed by PPL and executed by Probotiq.
2016
In the spring of 2016, the Dammann sprayers went back to the factory to update the hardware and software. This update makes a number of new options available for the sprayers. Curve control and the new pneumatic and hydraulic boom control with 4 ultrasonic sensors are examples of this.
Fertilization was carried out in the spring with a Vervaet equipped with an NIR sensor. This sensor is able to measure the nitrogen present in real time. In this way, fertilization is no longer per cubic meter, but on nitrogen content. For example, the nitrogen is evenly distributed over the field, or task-oriented.

Two new drones have been ordered. These are the Foxtech D130 and the Avular. The Foxtech D130 is equipped with a Micasense camera. This drone is also capable of carrying heavy loads, making it possible to hang multiple and heavier cameras and sensors underneath. The Avular, which is expected at the end of 2016, will be equipped with a hyperspectral camera and RTK-GPS. This makes the measurements even more precise. The drones can now be used if the maps of the near sensors and satellite maps do not provide sufficient insight into what is going on in the field. By flying over the plot with the drone, a better impression is quickly given.
A gamma sensor is now also mounted on the Kubota. This sensor measures elements that respond to radioactive radiation by means of gamma radiation. Research has shown that Kali is an element that reacts strongly to this. Since Kali is an important element for the potato plant, it makes sense to know the presence of Kali in the soil.

In 2016, the brothers Jan and Jacob decided to replace the previously mounted reel boom for the traditional spray gun. The sprinkler tree was very maintenance sensitive and given the irrigation from wells this was not an option.
2017
In addition to all the soil scans that we have conducted and analyzed in recent years, we have also started looking at whether more parameters could be measured in the soil. We have seen many problems in the soil in recent years, but it was always striking that the biggest problem was soil compaction. We also wanted to be able to measure the profile thickness, because this can make a big difference in rootable depth and ultimately in the yield potential. In order to measure these 2 things, we purchased the Fritzmeier profi 60 in the summer of 2016. This is a soil sampling device that could measure soil resistance and tread depth while simultaneously taking soil samples at 3 different depths. The first plan was to attach this drill bit to the kubota, but during the season we found out that it did not have enough power to power the drill. We decided in the autumn of 2016 to purchase a small tractor for this. To be able to use all the possibilities of our Probotiq system, we soon came up with a Fendt vario 210 P.
The fendt 210 p vario that we have purchased is equipped with the percision makers autonomous package. This allows the tractor to perform the scan work completely autonomously without a driver. The system also makes it possible to drive exactly to the calculated sample locations and to drill a hole here.
The system is built in such a way that after the scan with the dual 21hs, the recorded data is used to calculate the sampling location and then drive there autonomously. This Dualem soil sensor is able to measure the plot in 6 different depths. We also mounted the Medusa Gamma sensor under the soil drill to measure the texture of the soil. (think of the sand / clay fraction, luttem and organic matter)


After testing with an Ebee in 2015, it was decided in 2017 to purchase an Ebee. The Ebee was used together with a multispec 4c camera with which plots could be mapped. In addition to purchasing the Ebee, the Insprie 2 drone was also purchased in 2017. This drone has a 24 mega pixel camera with which weeds can be mapped in plots.
In 2017 we worked for the first time with the manure breaker from Louis Deenen. This year he has purchased a new Tebbe 3-axis manure crusher with weighing system and the possibility to break variable manure using task cards. Because we do not want to be dependent on a machine, we tried this year to fertilize this machine variably based on our soil scans.

To accelerate the adoption of precision agriculture in the Netherlands, the Practice Center for Precision Agriculture has been established. With these innovations, we are heading for less use of water, minerals, plant protection products and resources to achieve more output (qualitative and quantitative). The innovation groups with arable farmers, arboricultural and fruit growers, open field vegetable growers and other open crops are central. Together with innovation groups, intensive work is being carried out for three years on testing the techniques and interpreting the data in practice. We also look at how the innovations and the data that are available can be used for their business operations.


2018
In 2018, investments were made again in a drone in which the Matrice 210 was purchased. This drone has three cameras which were as follows, the thermal x4s also called FLIR, a 20 mega pixel camera and an RBG camera. With the FLIR camera, thermal images of a field could be made with which it could be compared whether a Phytophthora infestation was related to the crop temperature.
In 2018, it was decided to purchase a peat house manure tank to spread slurry over parcels cultivated with van den Borne potatoes. This manure tank was a nutriflow tank with which it is possible to analyze manure data. The nutriflow manure tank can analyze manure from the manure pit, but also during spreading. It is possible to include nitrogen, potassium, phosphate, dry matter and ammonium.
To analyze the sampled fields more efficiently, van den Borne purchased the smart grader in 2018. This robot is able to analyze tuber samples for height, size sorting and underwater weight. With the purchase of the smart grader, the analysis of the potato samples is automated and manual work is a thing of the past.
In 2018, an interesting article about the precision farming of Van den Borne Potatoes can be read in the National Geographic.
In 2018, the last Trible RTK GPS system at Van den Borne disappeared from the farm. These have all been replaced for the Fendt GPS system. The video below shows how to work with the Fendt GPS.
2019
In order to monitor the plots even better during the growing season, the micasense Altum camera was purchased in 2019. This camera was built on the inspire 2 drone with which tests and plots can be monitored during the growing season.
In 2019 we exchanged our old Rauch fertilizer spreader for the latest model. Technically, this fertilizer spreader has improved a lot, but there are also a few new options in the software field. For example, we can now sprinkle quantities left and right separately via a task card.

Also this year we harvested 3 pumas 3. Both machines were equipped with AVR Connect this year. this is a communication module that forwards all data from the harvester (including yield measurement) to the AVR Cloud. All this data is made visible on the AVR Connect web portal, making harvest management much easier. Everyone can also see where the harvesters are and, for example, how much fuel they have left.
In addition, investments were made in an Imants spading machine with a working width of 6 meters. The wish is to apply control traffic farming to the entire crop, whereby the working width is widened to 6 meters. By applying this principle, the soil compaction is reduced, so that the soil life is largely spared.
In 2019, investments were also made in the Raindancer program. Raindancer ensures that water is used in a sustainable way. When using Raindancer, a GPS location is placed on the spray gun with automatic section switching. This automatically controls the width of the spray gun, which prevents overlap and wastage of water.


In 2019, special hyperspectral cameras were also built on the potato harvester. These cameras are able to scan the harvested potatoes for length and tare. The camera is mounted on top of the bunker filler belt.

2020
In order to make cultivation measures concerning spraying plant protection products even more efficient, it was decided in 2020 to build a new type of spraying technology for the trailed Dammann. The PWM technique, Puls Width Modulation, was chosen, whereby the syringe per cap can be controlled every 50 cm. With the PWM technique, the nozzles switch on and off 10 to 100 times per second. Due to the large variation, it is easy to change the delivery in addition to control per cap. With spraying in curves, the sprayer can now also automatically adjust, with more spraying in the outer bend than in the inner bend. In this way an optimal spray pattern can be obtained.
In 2020 we also bought a 3-axis compost spreader that can read and spread task cards. In this way we can adapt the compost gift to the soil in order to create an optimal building furrow.
As of 2020, as van den Borne potatoes, we want to apply a CTF system, control traffic farming, in which as much as possible is cultivated on tramlines. With the purchase of the Imants wheel spit seeder we can now sow green manures and grains with a working width of 6 meters. With the purchase of this machine, we have a working width of 6 meters, so we compact less land per hectare. By counteracting soil compaction, soil life is maintained better and we try to obtain a resilient soil.
In 2020, we purchased a new Dualem sensor, the Dualm 1 HS, with Soilmasters, which includes van den Borne potatoes. This sensor makes it easier to map orchards where measurements are taken at 4 different depths.
With the latest developments with GPS, it is now also possible to let the tractor drive through the corners autonomously. During the fertilizer spreading this is recorded on the basis of a video.


Social media
Bezoekers online: 23