

Geschiedenis precisielandbouw
1996In 1996 nam Louis van den Borne de eerste stap richting precisielandbouw. Er werd een registratiesysteem uitgeprobeerd wat gekoppeld werd aan een Muller UNI-Control S. De UNI-Control-S boordcomputer kan het hele jaar door, op vele landbouw machines, worden gebruikt voor het meten (oppervlakten/afgelegde weg), regelen- (van hoeveelheden), controleren en opslaan van de gegevens
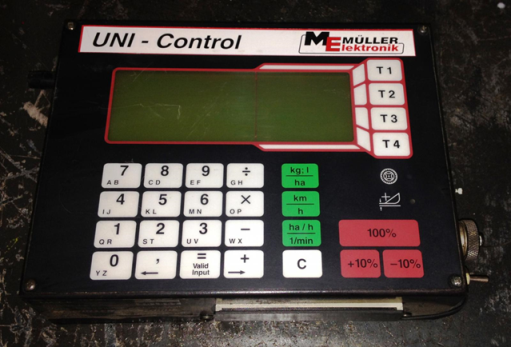
Dit systeem werd aangeschaft om de spuitregistratie automatisch te laten verlopen door het brandstofverbruik en de taaktijden te meten en persoonsregistratie uit te voeren. In combinatie met kostprijsberekening en voorraadregistratie was dit een betrouwbaar en eenvoudig systeem.
1998
De chipkaart van de UNI-Control S werd tot 1998 ondersteund door Comwaes. Toen MS-DOS naar Windows 3.1 overschakelde, kon Comwaes de chipkaart niet meer ondersteunen en werd het systeem onbruikbaar zolang er geen ander ondersteunend bedrijf werd gevonden. Dacom, een bedrijf dat sinds 1980 teeltregistraties uitvoert aan de hand van geavanceerde ICT-oplossingen, had een programmeur in dienst die ook met de Müller UNI-Control werkte. De monteur welke in dienst was zorgde ervoor dat het systeem ondersteund bleef waardoor van den Borne het systeem hield.
In 1998 werden de eerste stappen gezet als het gaat om het registreren van veldgrenzen. ISAplan, een Franse software, werd ontwikkeld voor geodata. In deze software was het mogelijk om data te verwerken. Een programma dat deel uitmaakte van ISAplan, was ISAGPS. Dit programma draaide op een PDA, een zogeheten I-PAC. Met deze PDA werden de veldgrenzen ingelopen. Doordat er nog geen RTK-GPS was, waren deze veldgrenzen tot op 5 meter nauwkeurig.
De veldgrenzen werden vervolgens in ISAplan verwerkt. Hierbij was het niet mogelijk om een achtergrond te plaatsen achter de veldgrenzen. De beschikbare kaarten bevatten alleen achtergronden van Nederland. De percelen waren verspreid over Nederland en België, waardoor deze kaarten niet bruikbaar waren als achtergrond.
Door de contacten met Dacom via het Uni Control S systeem, werd in 1998 het aardappelziektemodel van Dacom uitgeprobeerd. Hiervoor werd er een weerstation opgezet. Het ziektemodel sorteert de percelen op risico’s. Daarbij hanteert Dacom een puntensysteem. Dit werd gerangschikt in prioriteit van spuiten. Ziektegevoelige percelen staan boven aan de lijst. In combinatie met de Müller UNI-Control S konden taken van de ziektebestrijding worden ingeladen. De spuitcomputer berekende de hoeveelheid spuitmiddel per hectare. Het gewasstadium, de gewasgroei en de gewasstand moest nog zelf worden ingevoerd. Beide veldspuiten die Van den Borne bezat werden met een UNI-Control S uitgerust.


2000
Jacob wilde in 2000 thuis gaan werken. Hij moest echter van zijn vader, Louis, verder studeren. Jacob ging naar de HAS in Den Bosch. In zijn derde leerjaar liep hij stage bij Grimme, waarbij ze bezig waren met opbrengstmetingen. De sensoren op de rooimachine werden dan ook bij Van den Borne Aardappelen getest, welke erg goed bevielen. De sensoren werden gekocht en bij Van den Borne op de aardappelrooier gemonteerd.
Daarnaast kwam de wens om percelen in kaart te brengen aan de hand van zogeheten ‘stafkaarten’ van Nederland en België. Dit werkte in de praktijk niet, omdat de grenskaarten van beide landen niet met elkaar overeen kwamen. Na inscannen bleken de perceelgrenzen niet overeen te komen.
De oplossing werd gevonden bij Synoptic. Dit was een geografisch bedrijf uit Wageningen dat satellietkaarten verkocht. Deze kaarten konden gebruikt worden als achtergrond. Nadeel aan deze kaarten was het feit dat wegen en straten niet op deze kaarten zichtbaar waren. Hiervoor werden nieuwe wegenkaarten gekocht bij Tele Atlas. Dit bedrijf werd later overgenomen door TomTom.
2004
In 2004 werd er een kunstmeststrooier aangeschaft welke de afgifte kon meten. Zo kon er precies worden nagegaan hoeveel kunstmest er op elk perceel gestrooid werd. Deze Rauch machine kon via ISOBUS links en rechts variabel gedoseerd strooien. Met de hand kon de dosering worden aangepast. Er bestaat nog geen software die links en rechts gestuurd kan doseren.

Er werd een Hassia hydraulische poter gekocht, waarmee in de middelste rijen 10% meer gepoot kon worden. Dit had als voordeel dat er in de twee ruggen naast de spuitpaden, 10% meer pootaardappelen gepoot werden.
2006
In samenwerking met PPL, plaatste van den Borne aardappelen een bodemvochtsensor, om vervolgens de beregening te kunnen aansturen. Dit beregeningssysteem werd geleverd door Dacom. De bodemsensor meet het aanwezige bodemvocht, waardoor tekorten snel opgemerkt kunnen worden.
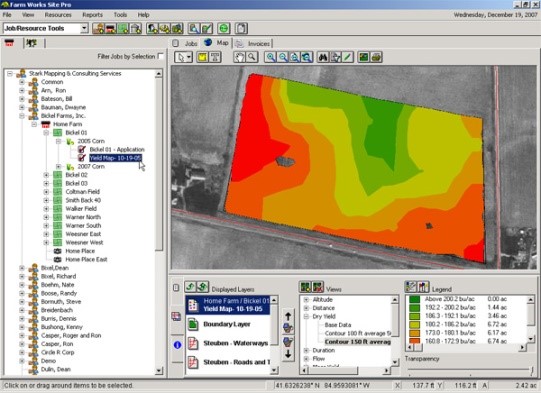
Omdat er steeds meer data werd ingewonnen met verschillende systemen, koos Van den Borne voor het softwarepakket Farm Works Software. Farm Works Software maakt het mogelijk om kaarten vooraf in te tekenen, maar ook achteraf aan te passen. Ook de teeltregistratie kan met Farm Works Software worden gedaan. Reden voor de aanschaf van Farm Works Software was dat deze meer verschillende data kon verwerken van verschillende fabrikanten.
2007
Om precisielandbouw nog verder in het bedrijf in te voeren, werd er in 2007 een nieuwe tandem getrokken veldspuit van Dammann gekocht. Deze veldspuit was uitgerust met een sectiebediening via GPS. Dit alles werd aangestuurd door middel van ISOBUS, waardoor er enorm bezuinigd werd in het aantal kabels dat van de trekker naar het werktuig liep. De bediening werd ook door ISOBUS geïntegreerd.
Deze veldspuit had in de software een stuurwiel met vraagteken, waarna Jacob research ging doen naar de betekenis van dit icoontje. Hij kwam uit bij Reichardt. Reichardt is een Duitse leverancier van GPS-systemen. Zij leverden het eerste GPS-systeem wat gebruik maakte van D-GPS in combinatie met ultrasoon sensoren. Hierdoor kon er een precisie worden bereikt van 2 tot 3 centimeter nauwkeurig.

Het voorjaar van 2007 zijn we begonnen met een nieuwe ploeg op proef.
De nieuwe ploeg is een Lemken Varitansanit 7-schaar. We hebben geploegd met een Fendt 820 Vario. Deze heeft een vermogen van 206 pk maximaal. Het ploegen ging dit jaar subliem. De nieuwe ploeg heeft zich goed bewezen dit voorjaar. Door een nieuw systeem van Lemken dat ervoor zorgt dat de wielslip die standaard bij het ploegen rond de 20% a 25 % zit, wordt gereduceerd tot 3% a 5% kunnen alle pk's optimaal worden gebruikt. Hierdoor is het dus mogelijk om met een Fendt van 200 pk een 7-schaar ploeg met ondergronders en een vorenpakker te trekken. Ook de kopakkers ploegen gaat met het grootste gemak. We ploegen de kopakkers altijd met de voor naar binnen. We kunnen namelijk bij de laatste voor het achterste wiel heffen zodat deze geen voor meer ploegt. We hebben met deze ploeg gemiddeld 7 km/uur kunnen ploegen gemeten met de radarsensor (minimale slip). De ploeg heeft een werkbreedte van 3.75 meter. Dit komt neer op een capaciteit tijdens het ploegen van iets meer dan 2.5 ha per uur. Als we het keren en transport over de weg daar van aftellen komen we op een gemiddelde capaciteit van 2.2 ha per uur. Hierdoor heeft hij dezelfde capaciteit als de spitmachine.

2008
Seizoen 2008 is gestart met het gebruik van twee Hassia SL+ poters. Halverwege het seizoen werd door Miedema de Hassia CP geïntroduceerd. Deze machine was ten opzichte van de SL+ verbeterd. De missercontrole, rijpadschakeling en afleg van aardappelen zijn hier voorbeelden van. Door deze verbeteringen werd de precisie van de poter vergroot.

De veldspuit die in 2007 werd gekocht, had sectie control via GPS met secties van drie meter en werd in 2008 uitgerust met zes Greenseekers, welke zijn geïnstalleerd door Randy Wilbrink. Dit zijn biomassasensoren die door middel van lichtreflectie de dichtheid van het gewas meten. Omdat de Greenseekers elk een eigen lichtbron hebben, kan er zowel overdag als ’s nachts worden gemeten. De bruikbare data van de Greenseekers wordt uitgedrukt in NDVI, Normalized Difference Vegetation Index. Deze data werd in Farm Works Software verwerkt.
2009
Na de testfase van de Hassia CP in 2008, werden in 2009 twee Hassia CP’s aangeschaft. Het GPS-systeem van Reichardt werd uitgebreid met RTK, Real Time Kinematic. Hierdoor werd de nauwkeurigheid van het GPS-systeem verbeterd tot 2 centimeter afwijking. De ultrasoon sensoren waren hierdoor overbodig geworden en het gebruiksgemak werd vergroot. Er hoefden nu geen extra ultrasone sensoren op de trekker te worden gemonteerd en meegesleept over de akkers. Het GPS-systeem werd ook uitgebreid met een stuurautomaat. Hierdoor konden twee trekkers tegelijk op dezelfde akker werken, zonder dat ze elkaar overlappen. Een tweede voordeel was dat de aardappelen nu precies recht in de rug liggen. Hierdoor kunnen er minder rooibeschadigingen optreden. Door het rechtrijsysteem kon de bestuurder zich beter concentreren op de poter, waardoor de kwaliteit van het pootwerk nog hoger werd.
Omdat de Greenseeker alleen maar NDVI kan meten, ging Van den Borne Aardappelen op zoek naar een andere, vergelijkbare sensor, die meerdere golflengtes kon meten. Op de Agritechnica in Hannover werd dan ook contact gezocht met Fritzmeier.
Sinds 2009 maken we ook gebruik van bodemvocht sensoren. Deze sensoren meten hoeveel water er zich nog in de bodem bevindt. Door het vocht te meten in de bodem kunnen we een optimaal moment van beregenen uitkiezen waardoor planten stress voorkomen wordt en water op een efficiënte manier wordt ingezet.
2010
Sinds 2010 wordt een autonoom voertuig van Probotiq gebruikt voor het scannen van de bodem. Met dit voertuig, een Kubota, wordt het perceel voor het scannen van de bodem ingereden. Omdat dit voertuig beschikt over RTK-GPS, zijn de perceelgrenzen tot op 2 centimeter nauwkeurig. Nadat de perceelgrenzen zijn ingereden, kan de Kubota zelfstandig over dit perceel rijden. Om alle percelen in kaart te brengen, wordt het programma Crop-R gebruikt. Dit teeltregistratieprogramma kan alle handelingen op alle percelen bijhouden, zodat medewerkers de percelen makkelijk kunnen vinden, maar ook alle handelingen kunnen registreren.
De Kubota die in 2010 werd aangeschaft, was onderdeel van een project dat PPL samen met WUR uitvoerde. Hiervoor werd de EM-38MKII door Van den Borne Aardappelen aangeschaft. Het project van PPL omvatte een vraagstuk over opbrengstpotentie aan de hand van bodemgeleiding.
Na het gesprek met Fritzmeier op de Agritechnica, werd in 2010 een proef gedaan door alle beschikbare gewassensoren op de spuitboom te plaatsen. Deze sensoren waren naast de Fritzmeier de YARA-N-Sensor, de OptRx en de Greenseeker. Na een proef van een jaar bleek inderdaad dat Fritzmeier de betrouwbaarste gewassensor was.
De aardappelrooier werd voorzien van nieuwe sensoren. De sensoren van Grimme werden vervangen. De nieuwe opbrengstsensoren die op de AVR Puma werden gemonteerd konden
de opbrengst nauwkeurig in kaart brengen.
Om opbrengstmetingen te kunnen doen wordt er gebruik gemaakt van een geavanceerde, specifieke opbrengstmonitor. Deze monitor, genaamd de YieldMaster PRO, is ontwikkeld door Van de Borne Aardappelen in samenwerking met Probotiq. De YieldMaster PRO werkt als volgt: op de aardappeloogstmachine zijn weegsensoren gemonteerd. Deze weegsensoren zijn bevestigd onder een lopende band op de oogstmachine. De aardappels die geoogst worden komen over deze band en gaan richting de voorraadbunker op de rooimachine. De weegsensoren meten de massastroom van de aardappels die over de lopende band richting de voorraadbunker van de machine gaan. De data die afkomstig zijn van deze meting wordt gecombineerd met rijsnelheid van de oogstmachine, bandsnelheid en GPS-informatie. Door deze combinatie te maken kan men nauwkeurige en locatie specifieke opbrengstkaarten maken. Naast opbrengstkaarten worden ook gewichten van verschillende vrachten en perceels- en dagtotalen vastgelegd.


2011
De Hassia CP, die uitgerust was met sectiebediening, werd in 2011 GPS gestuurd. De software, het HMI GPS planting Comfort, werd geïnstalleerd en zorgt ervoor dat de vier pootelementen op het juiste moment in- en uit worden geschakeld. Allereerst worden de contouren van het perceel ingereden. Vervolgens kan het perceel gepoot worden en zorgt de software ervoor dat de secties van de poter wordt ingeschakeld. Daarnaast kon de pootafstand traploos variabel worden ingesteld.
Tijdens de oogst met de hakselaar van loonbedrijf Reyrink uit Diesen voor het eerst een opbrengstmeting gedaan. Dit gebeurt via een opbrengstmeetsysteem net na de pick-up en een drogestof meting in de pijp. De bedoeling was om het proefperceel gras in kaart te brengen om vervolgens de bemesting te kunnen optimaliseren.
Toch blijkt na een onderzoek dat opbrengstmetingen via het hakselen van gras niet betrouwbaar is. Het gras dat op 1 m2 staat wordt bij het maaien en schudden verdeeld over een plek 117m2. Bij het harken worden ditzelfde gras op 2 zwaden verdeeld. Uit dit onderzoek is dus gebleken dat het gras dat gehakseld wordt, niet op dezelfde plaats gegroeid is.
Er werd voor het eerst met drones gevlogen. In het programma Nederland van Boven werd uitgelegd hoe dit werkt. Door middel van Multi spectraal-camera’s is te zien op welke stukken land er meer of minder bemest moet worden. Deze camera is in staat om meerdere bandenbreedtes van lichtweerkaatsing te meten, waardoor bladmassa en vitaliteit van de gewassen kunnen worden gemeten. Dit gebeurde met een vliegtuigje van Aura Imaging. Aan de hand van deze camerabeelden werd er voor het eerst, via de ISOBUS van de veldspuit, variabel loof doodgespoten.
2012
Om nog meer plaatsspecifieke bemesting toe te kunnen passen, kocht Danny Goris, loonwerker in Dessel (BE) een drie-assige mestspreider, welke taakkaarten kon lezen. Hierdoor was het mogelijk om variabel vaste mest te spreiden. De reden hiervoor waren de verschillen die in de percelen gemeten werden door de EM-38MKII.
De kunstmeststrooier werd in 2012 voorzien van een weeginstallatie. Hierdoor kon er precies worden berekend hoeveel kunstmest er werd gestrooid en in welke hoeveelheid per locatie.
De tweede vernieuwing bij het aardappelpoten was het gebruik van schaduwkaarten. In de schaduw werden aardappelen verder uit elkaar gezet, omdat de opbrengst in de schaduw toch al lager is. Er kan dus beter worden geïnvesteerd in bemesting, minder verdichting en andere factoren op plekken met een grotere opbrengstpotentie, dan op plekken waar geen grote potentie is.
Er werd een nieuwe Dammann veldspuit gekocht, die een dubbele tank had met een direct injectie systeem. Hierdoor konden meststoffen en gewasbeschermingsmiddelen gecombineerd worden, maar toch apart gedoseerd. Het direct injectie systeem wil zeggen dat de meststoffen en gewasbeschermingsmiddelen direct in de leiding wordt geïnjecteerd, waardoor er geen residuen in de tanks blijven zitten. Ook was deze veldspuit voorzien van sectiebediening per dop. Er werden zes Fritzmeier-sensoren aangeschaft die op de spuitboom werden gemonteerd.


Er werden nieuwe Fritzmeier-sensoren gekocht, die in een bok in de fronthef werden geplaatst. De kunstmeststrooier kon op deze manier direct worden aangestuurd, zonder de data eerst in Farm Works Software te hoeven laden om taakkaarten te maken. Dit gebeurde via een online systeem door middel van ISOBUS. In combinatie met de nieuwe weeginstallatie die op de kunstmeststrooier werd gebouwd kon er direct worden gezien hoeveel kunstmest er per locatie gestrooid was.
Ook werd dit jaar de eerste drone gekocht door Jacob. Dit betrof de Parrot AR Drone. Deze drone werd vooral gebruikt als oefendrone. Jacob maakte hiermee filmpjes van de machines.
De bieten worden voor het eerst gerooid met een Grimme Maxtron van Loonbedrijf Van Eijck uitgerust met opbrengstsensoren. De verschillen in opbrengst worden gebruikt om de bemesting in het voorjaar aan te passen.
2013
Nadat in 2012 de eerste drone werd gekocht, werd deze in 2013 vervangen door de DJI Phantom I. Ook deze drone gebruikte Jacob voor het oefenen met vliegen. Hij gebruikte voor het maken van foto’s en filmpjes een rechte lens in plaats van een Gopro. Hij was hiermee een van de enige in Nederland.
Er zijn voor het eerst testen gedaan met bijbemesting in de aardappelen aan de hand van de Fritzmeier gewassensoren met de Dammann veldspuit. Het blijkt dat er nog veel moet worden bijgesteld om een goede bijbemesting te spuiten. De rekenregels van de Fritzmeier zijn nog niet ontwikkeld genoeg om hier goede adviezen over te geven.
2014
Omdat Agrometius dealer werd van Veris, wilde Jacob deze graag uitproberen op zijn akker om een test en vergelijking te maken van de Verisscan van Agrometius en de EM-38 van Geonics. De Verisscan werkt op een iets andere manier, namelijk destructief. Hierdoor kan wel de pH van de bodem worden gemeten. Er is echter een veel zwaardere trekker voor nodig om deze scan te doen.
De uitslag van de test zijn in onderstaande tabel uitgewerkt.
| Eigenschap/scanner | Dualem EM-38MKII | Verisscan |
|---|---|---|
| Diepte | 0,5 - 1,0 m | 0,3 - 0,9 m |
| pH | nee | Ja |
| Bodemgeleidbaarheid | ja | Ja |
| Trekker | Kubota 50 pk | Trekker 150 pk |
| Nauwkeurigheid | 5 meter | 10 meter |
| Destructief | Nee | Ja |
Er werd ook een test gedaan met Miramap. Miramap is gespecialiseerd in het detecteren van vocht. De scanner die hiervoor zorgt is de Mirascan. Dit is een longwave radar welke door middel van lage frequenties de aanwezigheid van bodemvocht detecteert.
In het najaar van 2013 werd besloten om een Dammann drie-assige zelfrijdende veldspuit met dubbele tank aan te schaffen. Deze tanks hadden samen een inhoud van 12000 liter. Ook deze veldspuit werd uitgerust met zes Fritzmeier-sensoren. De sectiebediening die geïnstalleerd werd stuurde de spuit per drie doppen. De tandemspuit die in 2012 was aangeschaft werd ook weer terug omgebouwd naar sectiebediening per drie doppen. Sectiebediening per dop gaf namelijk niet de voordelen die verwacht werden. Om de werking van de sectiebediening te demonstreren, werd een grasland dat moest worden doodgespoten bedekt met het logo van Van den Borne Aardappelen.

Er werd dit jaar maïs geoogst met een Case Axial flow. Loonbedrijf gebroeders Vermeulen uit Bladel kocht deze machine die was uitgerust met een opbrengstsysteem. Hierdoor konden verschillen in de percelen worden opgemerkt, welke ook duidelijk zichtbaar waren. Vervolgens kon de bemesting in het voorjaar hierop worden aangepast.
De DJI Phantom I werd vervangen door de nieuwe versie, de DJI Phantom II. Deze had een aantal verbeterpunten ten opzichte van de eerste versie, zoals een betere accu. Er werd ook voor het eerst gevlogen met een Sky Hero, waarmee er kon worden gekarteerd. Deze kaarten werden ‘gestitched’. Dit wil zeggen dat de foto’s die de Sky Hero maakte, aan elkaar gekoppeld konden worden, waardoor er één grote kaart ontstaat. De Sky Hero was ook voorzien van waypoint navigatie, waardoor vliegen met een afstandsbediening niet meer nodig was.
Daarnaast is er in 2014 een mooie video gemaakt over de precisielandbouw bij Van den Borne Aardappelen. Deze video wordt hieronder weergegeven.
2015
De Dualem EM-38MKII was in staat om de geleidbaarheid op 0,5 meter en 1 meter diepte te meten. Storende lagen kunnen zicht echter veel dieper in de bodem bevinden. In 2015 werd de Dualem 21S aangeschaft. Deze bodemscanner is in staat om metingen te verrichten op vier verschillende dieptes, namelijk 0,5 meter, 1 meter, 1,5 meter en 3 meter. Hierdoor kon een nauwkeurigere scan worden gemaakt.

Er is een test gedaan door Bert Rijk met de Ebee. De eBee is een automatisch gestuurde, lichtgewichte UAV, geschikt voor het maken van luchtfoto’s. Met de 16MP hoge resolutie camera, legt de eBee beelden vast met een grondresolutie van 3 tot 30 cm per pixel. De eBee maakt niet alleen orthofoto’s, maar ook aanzichtfoto’s
De eBee wordt met de hand gelanceerd. Doordat de vleugels eenvoudig gedemonteerd kunnen worden, is de eBee handzaam te vervoeren.
Zelf heeft Jacob in 2015 zijn DJI Phantom II vervangen door de DJI Inspire 1. Dit is een quadcopter, die maximaal 3 kilometer ver kan vliegen met een topsnelheid van 80 km/h. Het landingsgestel kan inklappen, waardoor de camera die eronder hangt 360 graden kan draaien. Ook kan er live worden meegekeken met deze drone via een app op een smartphone. Er kunnen zelfs twee controllers worden aangesloten, zodat een iemand kan vliegen en een iemand de camera kan bedienen.
In 2015 zijn er een aantal nieuwe sensoren gekocht. Allereerst heeft Van den Borne 12 nieuwe bodemvochtsensoren gekocht van Dacom. Deze sensoren zijn weggezet op verschillende percelen, zodat accurate informatie wordt verzonden naar Crop-R.
Lemken had een nieuwe ploeg ontworpen die ISOBUS ondersteunt. Hierdoor werd de ploegbesturing geïntegreerd in de ISOBUS CCI Terminal. De betreffende ploeg is de Lemken Juwel met Fixpack. Het Geoplough X systeem is inmiddels gedemonteerd. De verdichting van de percelen wordt nu aan de hand van de trekkrachtregeling gemeten.
De Deense firma Fasterholt kwam op bezoek nadat ze op een lezing hadden gehoord dat Van den Borne Aardappelen al een aantal jaren bezig is met precisieberegening. Zei vroegen of Van den Borne mee wilde denken aan een toepassing op hun machines. Fasterholt bouwt zelfrijdende beregeningshaspels. Hiervan werd er dan ook een getest in 2015. Na een week werd besloten om een tweede haspel te kopen.

Vervolgens werd de spuitboom die in 2014 gekocht werd aan een zelfrijdende haspel gemonteerd. Hierdoor werd de capaciteit verhoogt en werd er minder energie verbruikt. De slangen van de haspel zijn ook dunner, omdat er niet meer aan getrokken hoeft te worden.
Voor een project van PPL werden op de nieuwe AVR Puma 3 nieuwe camera’s geplaatst met tarradetectie. Aanvankelijk was het de bedoeling om tarra te detecteren, zoals kluiten en stenen. In praktijk bleek dat de camera’s bruikbaar waren om kwaliteitsparameters te meten, zoals lengte en dikte van de aardappelen. Ook dit project is door PPL gefinancierd en door Probotiq uitgevoerd.
2016
In de het voorjaar van 2016 zijn de Dammann veldspuiten terug geweest naar de fabriek om de hardware en de software te updaten. Door deze update worden een aantal nieuwe opties beschikbaar voor de spuitmachines. Curvecontrole en de nieuwe pneumatische en hydraulische boombesturing met 4 ultrasoon sensoren zijn hier voorbeelden van.
Er is in het voorjaar bemest met een Vervaet uitgerust met een NIR-sensor. Deze sensor is in staat om real-time de aanwezige stikstof te meten. Op deze manier wordt er niet meer per kuub bemest, maar op stikstofgehalte. Zo wordt de stikstof gelijkmatig over het perceel verdeeld, of taakgericht.

Er zijn een tweetal nieuwe drones besteld. Dit zijn de Foxtech D130 en de Avular. De Foxtech D130 wordt uitgerust met een Micasense camera. Deze drone is ook in staat om zware lasten mee te nemen, waardoor het mogelijk is om meerdere en zwaardere camera’s en sensoren onder te hangen. De Avular, die eind 2016 verwacht wordt, wordt uitgerust met een hyperspectrale camera en RTK-GPS. Hierdoor kunnen de metingen nog preciezer worden uitgevoerd. De drones kunnen vanaf nu gebruikt worden als de kaarten van de near-sensors en satellietkaarten niet voldoende inzicht geven over wat er in het veld aan de hand is. Door met de drone over het perceel te vliegen wordt er snel een betere indruk gegeven.
Aan de Kubota is nu ook een gamma sensor gemonteerd. Deze sensor meet door middel van gamma-straling elementen die reageren op radioactieve straling. Uit onderzoek is gebleken dat Kali een element is dat hier sterk op reageert. Aangezien Kali een belangrijk element is voor de aardappelplant, is het zinvol om de aanwezigheid van Kali in de bodem te weten.

In 2016 hebben de broer Jan en Jacob besloten om de eerder op het haspel gemonteerde spuitboom weer te vervangen voor het traditionele sproeikanon. De beregenings boom was zeer onderhoudsgevoelig en gezien er beregend wordt vanuit putten was dit geen optie.
2017
Naast alle bodemscans die we de afgelopen jaren hebben uitgevoerd en geanalyseerd, zijn we ook gaan bekijken of er nog meer parameters te meten vielen in de bodem. We hebben de laatste jaren veel problemen gezien in de bodem maar hierbij viel altijd op dat het grootste probleem bodem verdichting was. Ook bleef bij ons de wens bestaan om de profiel dikte te kunnen meten omdat dit een groot verschil kan maken in bewortelbare diepte en dus uiteindelijk in de opbrengst potentie. Om deze 2 dingen te kunnen meten hebben we in de zomer van 2016 de Fritzmeier profi 60 aangeschaft. Dit is een bodembemonsteringsapparaat die bodemweerstand en profieldiepte zou kunnen meten en tegelijkertijd bodemmonsters op 3 verschillende dieptes kan nemen. Het eerste plan was om deze bodemboor te bevestigen aan de kubota maar tijdens het seizoen kwamen we er achter dat deze niet voldoende vermogen had om de boor te kunnen aandrijven. We besloten in het najaar van 2016 om dan maar een klein trekkertje hiervoor aan te schaffen. Om ook alle mogelijkheden van ons Probotiq systeem te kunnen benutten kwamen we al snel uit op een Fendt vario 210 P
De fendt 210 p vario die we hebben aangeschaft is uitgerust met het percision makers autonoom pakket. Hierdoor kan de trekker volledig autonoom de scan werkzaamheden uitvoeren zonder bestuurder. Ook maakt het systeem het mogelijk om exact naar de berekende monster plekken ter rijden en hier een boring uit te voeren.
Het systeem is zo gebouwd dat na de scan met de dualem 21hs, de opgenomen data wordt gebruikt om bemonsterlocatie te berekenen en hier dan autonoom naar toe te rijden. Deze Dualem bodemsensor is in staat om het perceel in 6 verschillende diepten te meten. Ook hebben we onder de bodemboor de Medusa Gamma sensor gemonteerd om de textuur van de grond te meten. (hierbij moet je denken aan de zand/kleifractie, luttem en organisch stof)


Na in 2015 proeven gedaan te hebben met een Ebee is er in 2017 besloten om zelf een Ebee aan te schaffen. De Ebee werd samen met een multispec 4c camera ingezet waarmee percelen in kaart gebracht konden worden. Naast de aanschaf van de Ebee is in 2017 ook de insprie 2 drone aangeschaft. Deze drone heeft een 24 mega pixel camera waarmee onkruid plekken in percelen in kaart kon worden gebracht.
In 2017 hebben we voor het eerst gewerkt met de mest breker van Louis Deenen. Hij heeft dit jaar een nieuwe Tebbe 3 assige mestbreker aangeschaft met weegsysteem en de mogelijkheid om variabel mest te breken aan de hand van taak kaarten. Omdat wij niet van een machine afhankelijk willen zijn hebben dit jaar geprobeerd om ook met deze machine variabel te bemesten aan de hand van onze bodemscans.

Om de adoptie van precisielandbouw in Nederland te versnellen is het praktijkcentrum voor Precisielandbouw opgericht. Met deze innovaties koersen we op minder gebruik van water, mineralen, gewasbeschermingsmiddelen en resources om meer output (kwalitatief en kwantitatief) te behalen. Centraal staan de innovatiegroepen met akkerbouwers, boom- en fruitkwekers, vollegrondsgroentetelers en overige open teelten. Samen met innovatiegroepen wordt er drie jaar lang intensief gewerkt aan het testen van de technieken en het interpreteren van de data in de praktijk. Tevens wordt er gekeken hoe de innovaties en de voorkomende data bruikbaar zijn voor hun bedrijfsvoering.


2018
In 2018 is er nogmaals geinvesteerd in een drone waarbij de Matrice 210 is aangeschaft. Deze drone beschikt over drie camera's welke als volgt waren, de thermische x4s ook wel FLIR genoemd, een 20 mega pixel camera en een RBG camera. Met de FLIR camera konden thermische beelden van een perceel gemaakt worden waarmee vergeleken kon worden of een Phytophthora aantasting in relatie stond met de gewastemperatuur.
Om drijfmest uit te rijden over percelen welke van den Borne aardappelen beteeld is in 2018 besloten om een veenhuis mesttank aan te schaffen. Deze mesttank betrof een nutriflow tank waarmee het mogelijk is mestdata te analyseren. De nutriflow mesttank kan mest analyseren vanaf de mestput maar ook tijdens het uitrijden. Hierbij is het mogelijk stikstof, kalium, fosfaat, droge stof en ammonium meegenomen.
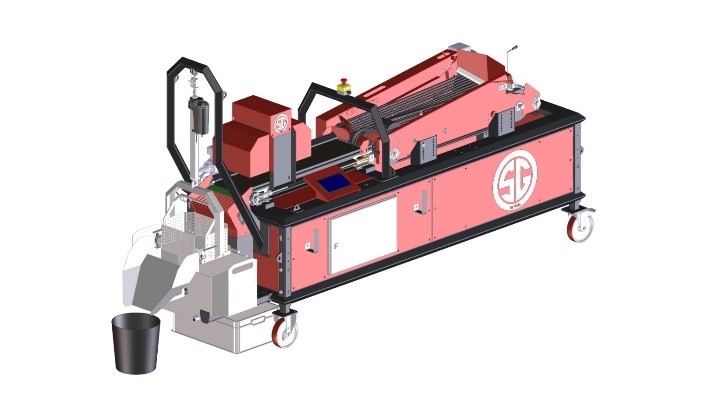
Om de bemonsterde velden efficiënter te analyseren heeft van den Borne in 2018 de smart grader aangeschaft. Deze robot is in staat om knolmonsters te analyseren op lengte, maatsortering en onderwatergewicht. Met de aanschaf van de smart grader is het analyseren van de aardappelmonsters geautomatiseerd en is handwerk verleden tijd.
In 2018 is er een intressant artikel over de precisielandbouw van Van den Borne Aardappelen te lezen in de National Geographic.
In 2018 is het laatste Trible RTK- GPS systeem bij Van den Borne van de boerderij verdwenen. Deze zijn allemaal vervangen voor het GPS- systeem van Fendt. In onderstaande video is te zien hoe er met de Fendt GPS gewerkt wordt.
2019
Om tijdens het groeiseizoen de percelen nog beter te kunnen monitoren is er in 2019 de micasense Altum camera gekocht. Deze camera werd opgebouwd op de inspire 2 drone waarmee proeven en percelen tijdens het groeiseizoen gemonitord kunnen worden.
In 2019 hebben we onze oude Rauch kunstmeststrooier ingeruild voor het nieuwste model. Technisch is deze kunstmeststrooier flink verbeterd maar ook op software gebied zijn er een paar nieuwe opties mogelijk. Zo kunnen we nu links en rechts apart hoeveelheden strooien via een taakkaart.

Ook dit jaar hebben we met de 2 puma's 3 gerooid. Beide machines waren dit jaar uitgerust met AVR Connect. dit is een communicatie modulen die alle data van de rooier (inclusief opbrengstmeting) doorstuurt naar de AVR Cloud. Al deze data wordt zichtbaar gemaakt op de AVR Connect web portaal waardoor het managen van de oogst veel gemakkelijker wordt. Ook kan iedereen zien waar de rooiers zijn en bijvoorbeeld hoeveel brandstof ze nog hebben.
Daarnaast is er geïnvesteerd in een Imants spitmachine met een werkbreedte van 6 meter. De wens is om de gehele teelt control traffic farming toe te passen waarbij de werkbreedte verbreed wordt naar 6 meter. Door dit principe te hanteren wordt de bodemverdichting verlaagd waardoor het bodemleven voor een groot gedeelte gespaard wordt.
In 2019 is er ook geïnvesteerd in het programma Raindancer. Raindancer zorgt ervoor dat er op een duurzame manier omgegaan wordt met water. Bij het gebruik van Raindancer is er een GPS-locatie op het sproeikanon met automatische sectie-schakeling geplaatst. Hierdoor wordt de breedte van het sproeikanon automatisch aangestuurd waardoor overlap en de verspilling van water wordt voorkomen.


In 2019 zijn er ook speciale hyperspectrale camera’s op de aardappelrooier gebouwd. Deze camera’s zijn in staat om de gerooide aardappels te scannen op lengte en tarra. De camera is bovenop de bunker vulband gemonteerd.

2020
Om teeltmaatregelen omtrent het spuiten van gewasbeschermingsmiddelen nog efficienter te maken is in 2020 besloten om een nieuwe soort spuittechniek om de getrokken Dammann te bouwen. Er is gekozen voor de PWM techniek, Puls Width Modulation waarbij de spuit per dop, om de 50 cm aangestuurd kan worden. Bij de PWM techniek gaan de spuitdoppen 10 tot 100 keer per seconde aan en uit. Door de grote variatie is het naast aansturing per dop ook gemakkelijk de afgifte te veranderen. Met spuiten in bochten kan de spuit zich nu ook automatisch bijsturen waarbij er in de buitenbocht meer wordt gespoten dan in de binnenbocht. Op deze manier kan een optimaal spuitbeeld verkregen worden.
Ook hebben we in 2020 zelf een 3-assige compost strooier gekocht welke taakkaarten kan lezen en strooien. Op deze manier kunnen we de compost gift aanpassen aan de bodem om een zo optimale bouwvoor te creëren.
Vanaf 2020 willen we als van den Borne aardappelen een CTF systeem, control traffic farming toepassen waarbij er zoveel mogelijk op rijpaden wordt geteeld. Met de aanschaf van de Imants woel spit zaai machine kunnen we nu groenbemesters en granen met een werkbreedte van 6 meter zaaien. Met de aanschaf van deze machine hebben we een werkbreedte van 6 meter en verdichten we dus minder grond per hectare. Door bodemverdichting tegen te gaan blijft het bodemleven beter in stand en proberen we een weerbare bodem te verkrijgen.
In 2020 hebben we met Soilmasters, waar van den Borne aardappelen onderdeel vanuit maakt een nieuwe Dualem sensor gekocht, de Dualm 1 HS. Met deze sensor wordt het gemakkelijker om boomgaarden in kaart te brengen waarbij er gemeten wordt op 4 verschillende diepten.
Met de nieuwste ontwikkelingen met GPS is het vanaf nu ook mogelijk om de trekker autonoom door de bochten te laten rijden. Tijdens het kunstmest strooien is dit vastgelegd aan de hand van een filmpje.


Social media
Bezoekers online: 36