

Soil scanning
2019
Soil scanning continues to form the basis for the start of every cultivation in 2019. In 2019 we sold the kubota and we will continue with the Fendt 210P. A lot of development has gone into the log computer and the processing in the cloud. Data is now transferred directly to the cloud and processed immediately. The zones are then sent back to the terminal and the sampling positions can be plotted with RTk accuracy or sampled directly



2018
We used both scanners again in 2018. We have also made comparisons with the veris for various test fields.



2017
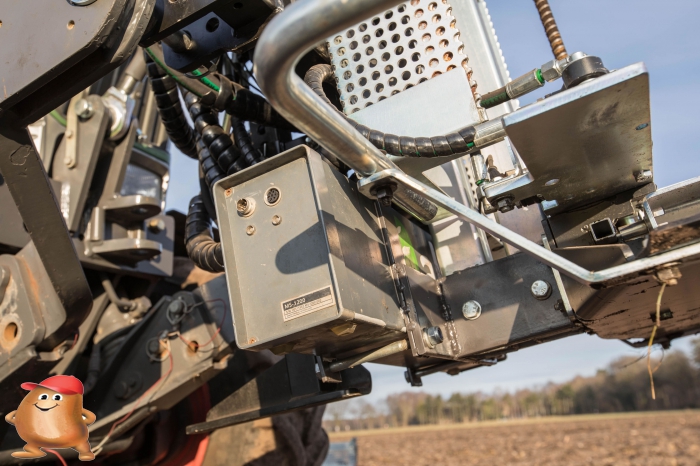
In addition to all the soil scans that we have conducted and analyzed in recent years, we have also started looking at whether more parameters could be measured in the soil. We have seen many problems in the soil in recent years, but it was always striking that the biggest problem was soil compaction. We also wanted to be able to measure the profile thickness, because this can make a big difference in rooting depth and thus ultimately in yield potential. In order to measure these 2 things, we purchased the Fritzmeier profi 60 in the summer of 2016. This is a soil sampling device that could measure soil resistance and tread depth while simultaneously taking soil samples at 3 different depths. The first plan was to attach this drill bit to the kubota, but during the season we found out that it did not have enough power to power the drill. We decided in the autumn of 2016 to purchase a small tractor for this. To be able to use all the possibilities of our Probotiq system, we soon came up with a Fendt vario 210 P.

The fendt 210 p vario that we have purchased is equipped with the percision makers autonomous package. This allows the tractor to carry out the scanning work completely autonomously without a driver. The system also makes it possible to drive exactly to the calculated sample locations and to drill a hole here.








2016
Because we had a very wet spring in 2015 and because of the contract work in clay areas, we decided to put our kubota back on caterpillars. After a long search we came out of my Sourcy tracks. These were built especially for our kubota RTV and not like the Mattracks only for recreaction but also for heavy and long loads



Spring 2016 was also very wet but thanks to the Sourcy Tracks this was no problem at all






2015
In 2015 we decided to purchase Dualem 21s. We had already tested this sensor in 2010, but we found it far too expensive. Because the dual scans multiple depths 1 in one pass, the data can be calibrated much better and contains far fewer errors. The calibration of the data and the conversion to map material was from this moment carried out by the University of Ghent (Orbit)



We also saw that there was an increasing demand in the market for soil scans and we decided to offer this service in contract work via Loonwerkgps. As a result, we also ended up with other companies such as golf and sports park maintenance companies such as the Enk



2014
After several years of research into soil scanning, we also came into contact with the Miramap soil sensor. This sensor was an L-band Radar that should also be able to say something about the soil moisture condition. We mounted this sensor on the kubota and compared the miramap sensor to our EM38-MK2 bottom sensor all season.






We also applied compost for the first time using the EM38-MK2 soil scan. In the film below you can see how it worked.
2013
In 2013 we test the Veris Soil Scanner for the first time. This soil sensor measures the soil conductivity between the discs (Contact measurement). The organic matter and the pH of the soil can also be mapped with this sensor.






2012
After a successful test of the dual 21s bottom scanner, we also decided to invest in a bottom sensor. Because the cost of a Dualem sensor was high, we decided to purchase a Geonics EM38-MK2 Soil Sensor. This measures the soil conductivity in 2 depth, namely 0 to 0.5 meters deep and 0 to 1 meters deep. To pull this sensor, we also invested in a Kubota RTV 900 that we equipped with a Probotiq autopilot on RTK and Mattracks tracks.



2011
In the spring of 2011, a soil scan was also carried out by the University of Ghent (BE). They then came to scan with a Dualem 21s soil sensor. This sensor was able to measure multiple depths simultaneously. from 0 to 0.5 meters, 0 to 1 meters, 0 to 1.5 meters and 0 to 3 meters deep. This soil scan was also performed as part of the PPL project



2010
In 2010 we started scanning our agricultural land. As part of the PPL project we then had the first soil scans performed





Social media
Bezoekers online: 11